科学家设计出一种由肌肉组织驱动的两足机器人
与机器人相比,人体灵活,能够进行精细动作,能够高效地将能量转化为运动。日本研究人员从人类步态中汲取灵感,通过结合肌肉组织和人造材料,制造出了一种两足生物混合机器人。该方法于1月26日发表在《Matter》杂志上,该方法允许机器人行走和旋转。
日本东京大学的通讯作者ShojiTakeuchi表示:“生物混合机器人的研究融合了生物学和力学,作为具有生物功能的机器人学新领域,最近引起了人们的关注。”“使用肌肉作为执行器使我们能够构建紧凑的机器人,并通过柔软的触感实现高效、安静的运动。”
研究小组的两足机器人是一种创新的双足设计,建立在利用肌肉的生物混合机器人的基础上。肌肉组织驱动生物混合机器人向前爬行、游泳和转弯,但不能急转弯。然而,能够枢转和急转弯是机器人避开障碍物的基本特征。
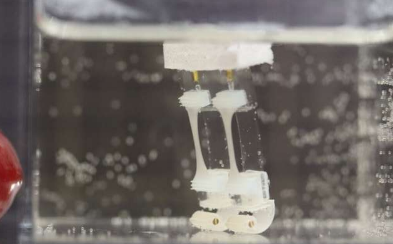
为了建造一个动作更灵活、动作更精细的机器人,研究人员设计了一种模仿人类步态并在水中操作的生物混合机器人。该机器人有一个泡沫浮标顶部和加重的腿,以帮助它在水下直立。机器人的骨架主要由硅橡胶制成,可以弯曲和伸缩以适应肌肉运动。然后,研究人员将实验室培养的骨骼肌组织条贴在硅橡胶和每条腿上。
当研究人员用电击打肌肉组织时,肌肉收缩,将腿抬起。当电流消散时,腿的脚后跟向前着地。通过每五秒在左右腿之间交替进行电刺激,生物混合机器人成功地以5.4毫米/分钟(0.002英里/小时)的速度“行走”。
为了转弯,研究人员每五秒反复敲打右腿,同时左腿充当锚点。机器人在62秒内完成了90度左转。研究结果表明,肌肉驱动的双足机器人可以行走、停止和进行微调的转弯动作。
“目前,我们正在手动移动一对电极,将电场分别施加到腿部,这需要时间,”竹内说。“未来,通过将电极集成到机器人中,我们期望更有效地提高速度。”
该团队还计划为双足机器人提供关节和更厚的肌肉组织,以实现更复杂和强大的运动。但竹内说,在用更多生物组件升级机器人之前,团队必须集成营养供应系统,以维持活体组织和设备结构,使机器人能够在空气中运行。
“当我们在视频中看到机器人成功行走时,在我们的例行实验室会议上爆发出欢呼声,”竹内说。“虽然它们看起来像是一小步,但事实上,它们是生物混合机器人的巨大飞跃。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【木地板材料】木地板是一种广泛应用于家居和商业空间的地面装饰材料,因其自然美观、耐用性强、环保性好等特...浏览全文>>
-
【木地板安装】木地板安装是一项需要细致规划和专业操作的工程,无论是新房装修还是旧房翻新,选择合适的木地...浏览全文>>
-
【木的组词怎么写】在汉语学习中,词语的积累和运用是非常重要的部分。对于“木”这个字来说,它不仅是常见的...浏览全文>>
-
【木的象形字有哪些字】在汉字的发展过程中,许多字最初都是通过象形的方式创造出来的,用来表示具体的事物。...浏览全文>>
-
【木岛法子介绍】木岛法子(Kazuko Kikuchi)是日本著名演员、模特及艺人,以其在影视作品中的出色表现和独特...浏览全文>>
-
【木代尔是什么面料】“木代尔是什么面料”是许多消费者在选购衣物时常常会提出的问题。木代尔是一种天然纤维...浏览全文>>
-
【木代尔和莫代尔哪种面料好】在选择衣物面料时,很多人会遇到“木代尔”和“莫代尔”这两个名称,容易混淆它...浏览全文>>
-
【萝卜的营养价值】萝卜是一种常见的根茎类蔬菜,不仅味道清脆爽口,还具有丰富的营养价值。无论是生吃、炒食...浏览全文>>
-
【萝卜的药用功效和作用】萝卜,作为日常生活中常见的蔬菜之一,不仅味道清脆、营养丰富,还具有多种药用价值...浏览全文>>
-
【萝卜的家常做法】萝卜是一种非常常见的蔬菜,不仅价格实惠,而且营养丰富,适合多种烹饪方式。无论是炖、炒...浏览全文>>