预测物理模型帮助机器人掌握不可预测的事物
当机器人遇到不熟悉的物体时,它们很难解释一个简单的事实:外表并不代表一切。它们可能会试图抓住一个积木,结果却发现它其实很容易抓。物体的误导性外观可能会导致机器人错误计算物体的重量和重心等物理特性,从而使用错误的抓握方式并施加超过所需力量。
为了看清这一错觉,麻省理工学院计算机科学与人工智能实验室(AIL)的研究人员设计了“抓取神经过程”,这是一种预测物理模型,能够实时推断这些隐藏的特征,从而实现更智能的机器人抓取。基于有限的交互数据,他们的深度学习系统可以协助仓库和家庭等领域的机器人,而计算成本仅为以前算法和统计模型的一小部分。
抓握神经过程经过训练,可以根据抓握尝试的历史推断出不可见的物理属性,并利用推断出的属性来猜测哪些抓握在未来会很有效。之前的模型通常仅根据视觉数据识别机器人抓握。
通常,推断物理特性的方法建立在传统的统计方法之上,这些方法需要许多已知的抓取和大量的计算时间才能发挥作用。抓取神经过程使这些机器能够使用少得多的交互数据更有效地执行良好的抓取,并在不到十分之一秒的时间内完成计算,而传统方法则需要几秒(或几分钟)。
研究人员指出,抓取神经过程在家庭和仓库等非结构化环境中蓬勃发展,因为这两个环境中都存放着大量不可预测的物体。例如,由麻省理工学院模型驱动的机器人可以快速学习如何处理装有不同食物数量的紧密包装的盒子,而无需看到盒子内部,然后将它们放置在需要的地方。在配送中心,具有不同物理特性和几何形状的物体将被放置在相应的盒子中,然后运送给客户。
抓取神经过程经过1,000种独特几何形状和5,000个物体的训练,在模拟中实现了对ShapeNet存储库中生成的新型3D物体的稳定抓取。然后,AIL领导的团队通过两个加权块在物理世界中测试了他们的模型,他们的工作表现优于仅考虑物体几何形状的基线。
事先限制机械臂进行10次实验性抓握,在20次尝试中,机械臂分别成功抓握盒子18次和19次,而在没有准备的情况下,机器只能稳定抓握8次和15次。
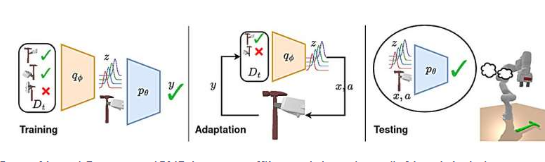
虽然不像演员那样戏剧化,但完成推理任务的机器人也需要遵循三个步骤:训练、适应和测试。在训练步骤中,机器人在一组固定的物体上练习,并学习如何从成功(或不成功)抓取的历史中推断物理特性。
新的AIL模型可以摊销物体物理的推断,这意味着它可以训练神经网络来学习预测原本昂贵的统计算法的输出。只需通过一次具有有限交互数据的神经网络,就可以模拟和预测哪种抓取方法对不同物体最有效。
然后,在适应阶段,机器人接触一个不熟悉的物体。在此步骤中,抓握神经过程帮助机器人进行实验并相应地更新其位置,了解哪种抓握方式最有效。这个调整阶段为机器的最后一步做好准备:测试,在此阶段,机器人在对物品属性有了新的理解后,正式对物品执行任务。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【木地板材料】木地板是一种广泛应用于家居和商业空间的地面装饰材料,因其自然美观、耐用性强、环保性好等特...浏览全文>>
-
【木地板安装】木地板安装是一项需要细致规划和专业操作的工程,无论是新房装修还是旧房翻新,选择合适的木地...浏览全文>>
-
【木的组词怎么写】在汉语学习中,词语的积累和运用是非常重要的部分。对于“木”这个字来说,它不仅是常见的...浏览全文>>
-
【木的象形字有哪些字】在汉字的发展过程中,许多字最初都是通过象形的方式创造出来的,用来表示具体的事物。...浏览全文>>
-
【木岛法子介绍】木岛法子(Kazuko Kikuchi)是日本著名演员、模特及艺人,以其在影视作品中的出色表现和独特...浏览全文>>
-
【木代尔是什么面料】“木代尔是什么面料”是许多消费者在选购衣物时常常会提出的问题。木代尔是一种天然纤维...浏览全文>>
-
【木代尔和莫代尔哪种面料好】在选择衣物面料时,很多人会遇到“木代尔”和“莫代尔”这两个名称,容易混淆它...浏览全文>>
-
【萝卜的营养价值】萝卜是一种常见的根茎类蔬菜,不仅味道清脆爽口,还具有丰富的营养价值。无论是生吃、炒食...浏览全文>>
-
【萝卜的药用功效和作用】萝卜,作为日常生活中常见的蔬菜之一,不仅味道清脆、营养丰富,还具有多种药用价值...浏览全文>>
-
【萝卜的家常做法】萝卜是一种非常常见的蔬菜,不仅价格实惠,而且营养丰富,适合多种烹饪方式。无论是炖、炒...浏览全文>>